Timeshared Robots
I’ve been wanting to do a Show HN for my robotics developer tool Yoga Studio for a while. But given that:
- it’s for programming robots
- you probably don’t have a compatible robot
it wasn’t something you could immediately play with.

Now, you have remote access to a robot you can program with it! The 2-wheeled balancing robot (“Greppy”) is sitting in our California warehouse ready to run your code. You’ll need to download and build Yoga Studio to control it – see full instructions below.
When you check out the code, it includes an examples/greppy directory with some code to
make the robot balance and drive around. When you start the app and click “Run Live”, it:
- Connects to the robot through a port in our firewall.
- Acquires a lock (only one user at a time. Don’t bogart the robot!)
- Uploads your code to the robot (start with the example code, but you can hack it up later.)
- The robot compiles and runs your code
- The robot streams live traces of all the sensors and computations done by the code, and also a video from a camera looking at the robot.
- You can drive the robot with WASD.
- The bottom pane shows the code running, along with current values for every expression.
- In the code pane, numerical parameters are overlaid with gui sliders. You can drag them around and they’re immediately updated on the robot.
- When you’re done, hit Escape and it’ll download the high-res traces to your machine.
- While viewing a saved trace, you can adjust parameters and it’ll overlay a counterfactual graph of what the code would have done with the new parameters.
- The Yoga language is fully differentiable WRT its parameters so you can click on an output variable (like motor speed) and it’ll tell you what parameters you should change in which direction to affect it.
Motivation
This is part of a project to make programming robots faster. My experience is that tuning the parameters of robot control code takes 10x longer than getting the structure of the code right, so I designed a language + IDE with a single-minded focus on solving the parameter problem. The language is:
- Differentiable with respect to its parameters
- Fast (statically typed and compiled)
- Purely functional (no side effects)
- Close enough to C for your editor’s syntax highlighting to work.
The compiler extracts anything marked as a parameter into a separate data structure, with a link to the location in the source code they came from. When the IDE renders the Yoga code, it shows the parameters as sliders.
| Code Editor | Yoga Studio |
|
|
Here’s what Yoga Studio looks like when controlling Greppy:

Feel free to hack on the code in examples/greppy. See if you can make the robot do something cool!
Read more in the Reference Manual.
Building and running
It should work on either Mac or Linux (Recently tested on Catalina and Ubuntu 19.10 & 20.04).
git clone --recurse-submodules https://gitlab.com/umbrellaresearch/yoga2.git
cd yoga2
git config submodule.recurse true
make install.deps # On Mac, uses Brew. On Linux, apt-get.
make -j8
Now fire up the Greppy example code:
bin/yogastudio examples/greppy/main.yoga
Click “Run live on on robot greppy1”.
It’ll then open up the real-time scope, showing live-scrolling graphs of several variables over time. And the video will show the robot starting to balance.
The greppy example code lets you drive the robot from your keyboard with WASD.
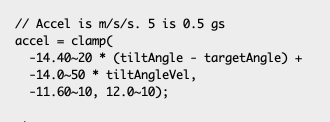
Try going to the balance.yoga file, and adjusting the first 2 parameters in the RHS of the assignment to accel. Those are roughly the P and D parameters of the main balance feedback loop. Start with
small adjustments and work up to large ones! The robot is attached to the ceiling with a rope, so you can’t do too much damage.
Hit Esc to end the live session, and switch to the recorded traces it just captured.
You can scroll back and forth in the recorded traces by scrolling left-right with your mouse. You can add or remove traces from the graph with the checkboxes on the left.
While looking at recorded traces, you can still drag parameters, but now rather than updating on the live robot, they redo the entire run, overlaying the counterfactual graphs. That is, it shows what the code would have done with the new parameters given the same inputs from the hardware.
To start another run on the hardware, hit Cmd-L (Ctl-L on Linux).
When you’re happy with the parameters, click “Save params” to write them back to the source code. If you’re following the example, that’ll be in the checked out directory under examples/greppy/
Please send any questions to support@yoga.dev